
Nathan Baune
Platform & Systems Engineer
I build production tools, ML systems, and complex software platforms — from real-time EEG classification and neuroimaging pipelines to a GPU-accelerated simulation engine with its own visual design environment, multi-language CLI, and LLM-powered natural language interface.
The thread connecting my work: studying how information processing architectures produce emergent behavior—from neural circuits to ML models to simulated ecosystems.
For the past decade I've built production systems in neuroscience and health tech:
- Research tools and systems shipped to 9 labs across 3 institutions.
- 2 startups: co-founder (PlatformSTL LLC), founder & principal engineer (Gothic Grandma LLC).
- MR.Flow: GUI orchestrating neuroimaging pipelines with parallel execution optimized to user hardware. Setup and deployment reduced from weeks to ~45 minutes.
- Epoche: ML workbench for neurophysiology—feature extraction, grid search, ensemble optimization, and interpretability tools for mechanistic hypothesis generation and model/ensemble deployment.
- Real-time ML classification of brain state for closed-loop experiment control, therapy onset, and neurostimulation. <40ms end-to-end latency.
- Proprio (PlatformSTL, St. Louis): STTR-funded wearable activity classification platform (hardware → cloud → ML pipeline) for monitoring patient care and long-term outcomes.
- Countless rapid-turnaround prototypes and hours of engineering, scientific, and statistical consulting.
Technologies
Current Interests
I'm actively exploring the intersection of AI and complex systems:
- Agentic AI architectures — how multi-model orchestration, tool use, and planning emerge in LLM-based systems
- Interpretability and alignment — making AI behavior legible and predictable, from SHAP/LIME to mechanistic interpretability
- Simulation as testbed — using MUSE's transparent, deterministic systems to study how architectural choices shape emergent behavior
- Human-AI collaboration — designing interfaces where AI augments rather than replaces human judgment (see: BABEL, Epoche)
Read more: How this question connects everything I've built →
Projects
MUSE Ecosystem
2025–PresentEmergent world simulation engine (100k+ entities) with biological/psychological systems, plus the tooling ecosystem to design, debug, and experience it. Visual system designs compile directly to GPU kernels—no hand-written simulation code.
Explore the full ecosystem → to get oriented, or click on a tool below to fast-track to one that catches your eye.
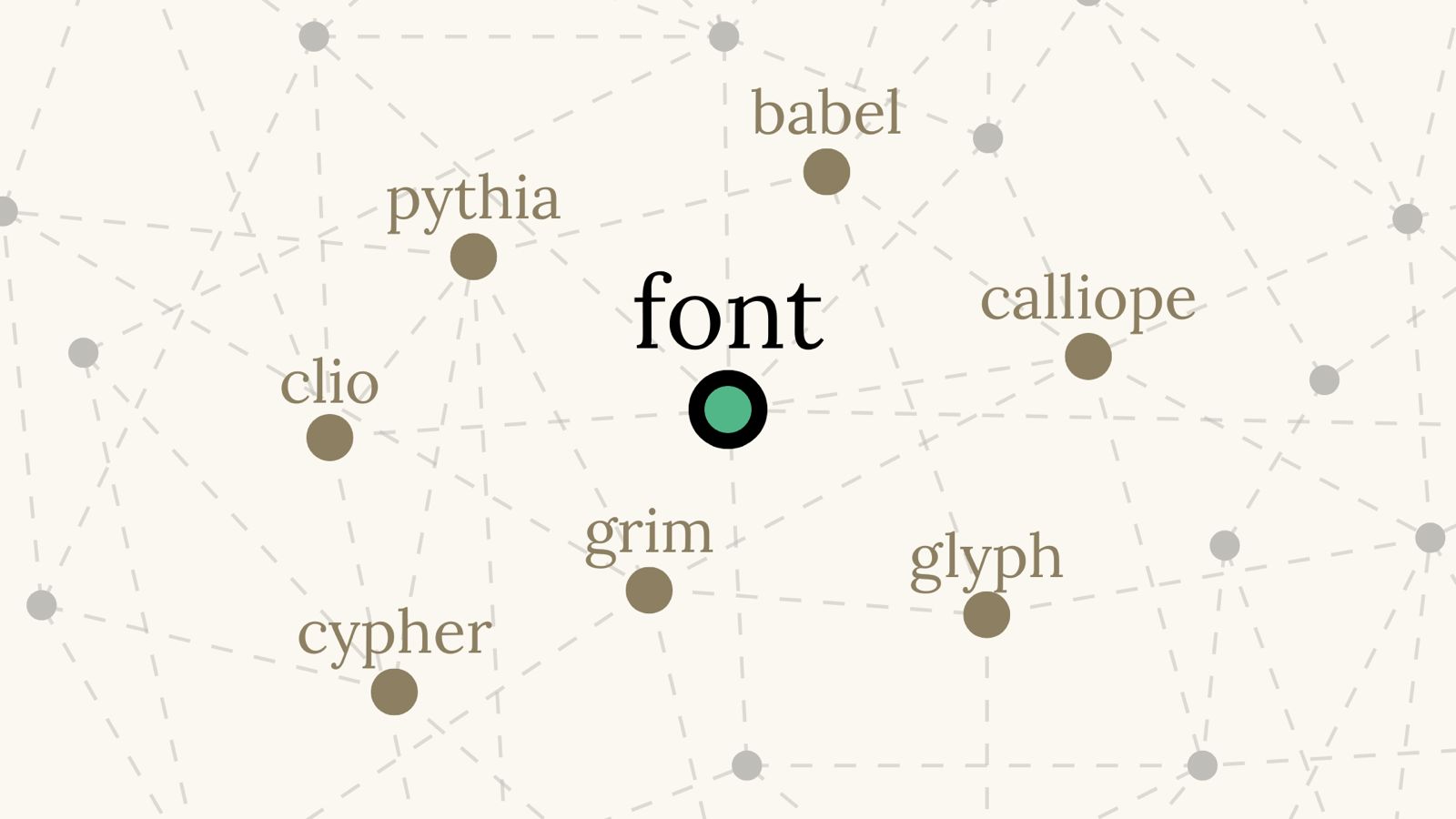 FONT
Simulation Engine
Biological simulation engine scaling to 100K+ entities. GPU-accelerated and deterministic.
FONT
Simulation Engine
Biological simulation engine scaling to 100K+ entities. GPU-accelerated and deterministic.
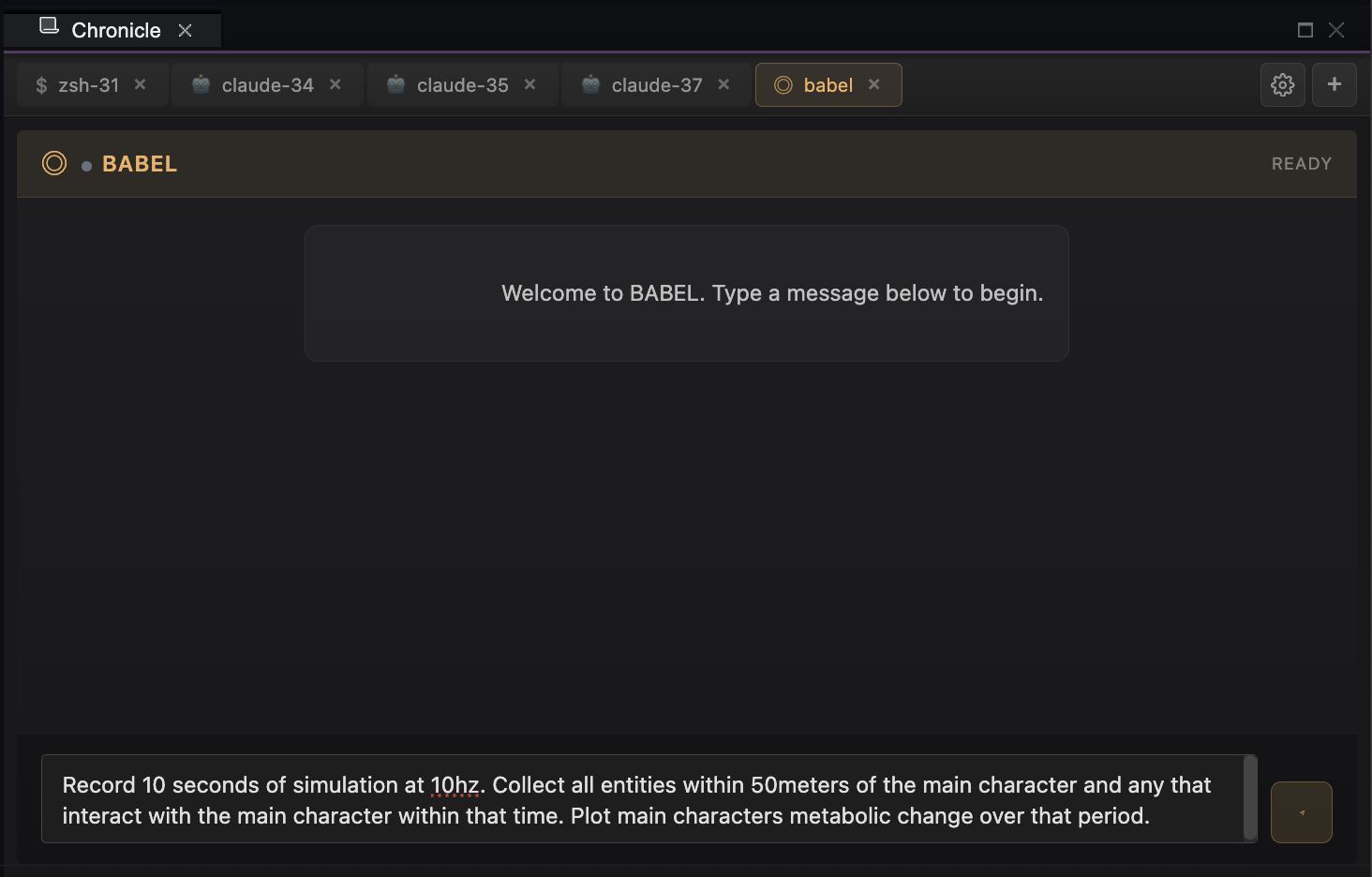 BABEL
Semantic Interface
Natural language parsing with vector-based command matching. Translates intent across all tools.
GLYPH
Interactive E-Reader
Interactive fiction interface where you guide, not control. Type or speak to influence the world.
CALLIOPE
Launcher & Library
Living Worlds marketplace and library manager. Downloads worlds, manages updates, launches GLYPH.
CYPHER
Entity Systems Designer & Profiler
Visual system designer and profiler. Design → schema → GPU kernels.
CLIO
AI-Augmented Dev Environment
AI-augmented dev environment with codebase analysis, multi-terminal, and session tracking.
BABEL
Semantic Interface
Natural language parsing with vector-based command matching. Translates intent across all tools.
GLYPH
Interactive E-Reader
Interactive fiction interface where you guide, not control. Type or speak to influence the world.
CALLIOPE
Launcher & Library
Living Worlds marketplace and library manager. Downloads worlds, manages updates, launches GLYPH.
CYPHER
Entity Systems Designer & Profiler
Visual system designer and profiler. Design → schema → GPU kernels.
CLIO
AI-Augmented Dev Environment
AI-augmented dev environment with codebase analysis, multi-terminal, and session tracking.
GG.Flow
2026–Present · AlphaVisual pipeline platform for multimodal scientific research. 148 nodes across 9 domains — EEG, MRI, ML, stats, viz — with language-agnostic SDK, content-addressable caching, and auto-generation from Python, R, CLI, and YAML.
MR.Flow
2024–PresentPipeline orchestration system for MRI processing. Worker coordination, task queuing, dependency management, and failure recovery for multi-stage analysis workflows across 150+ datasets.
Epoche
2023–PresentML workbench for neurophysiology. Feature extraction, grid search, ensemble optimization, cross-model interpretability, and publication export—with serialization for deployment to real-time C++ execution backends.

BIDS-SQL
2026–PresentDatabase schema and query infrastructure for BIDS neuroimaging datasets. SQLite/PostgreSQL schemas with Python library for import, export, and processing provenance tracking. Powers MR.Flow's dataset management.

Proprio
2017–2021Real-time wearable data platform for stroke rehabilitation. Apple Watch IMU streaming → AWS Lambda ingestion → MongoDB storage → patient-specific ML classifiers → clinician dashboards. $100K NIH STTR funded, peer-reviewed publication.
Research Portfolio
2015–2025A decade of research tools and systems across 9 labs: real-time closed-loop ML, robotic manipulandum control, VR experimental platforms, multi-device hardware synchronization, and data pipelines.
Precision Neural Engineering Lab, Emory University Medical
Neural Plasticity Research Lab, Emory University Medical
Neuromechanics Lab, Emory University Medical
Recent Writing
What I Learned from Years Working with "Black Boxes"
Build for inspection. Make state observable. Use AI for what it excels at.
Why ML Interpretability Needs Storytellers
Epoche: making ML legible to domain experts, not just engineers.
The Divide Between Deterministic Simulation & Black-Box AI
Why MUSE uses LLMs for translation, not generation.
From Research Pipelines to Production
Lessons learned from years operating across different engineering worlds.